
波德圖

波德圖(英語:Bode plot,「Bode」的英文發音類似Boh-dee,荷蘭文的發音則類似Bow-dah),又名波特圖,是線性非時變系統的傳遞函數對頻率的半對數座標圖,其橫軸頻率以對數尺度表示,利用波德圖可以看出系統的頻率響應。波德圖一般是由二張圖組合而成,一張幅頻圖表示頻率響應增益的分貝值對頻率的變化,另一張相頻圖則是頻率響應的相位對頻率的變化。[1]
波德圖可以用電腦軟體(如MATLAB)或儀器繪製,也可以自行繪製。利用波德圖可以看出在不同頻率下,系統增益的大小及相位,也可以看出大小及相位隨頻率變化的趨勢[2]。
波德圖的圖形和系統的增益,極點、零點的個數及位置有關,只要知道相關的資料,配合簡單的計算就可以畫出近似的波德圖,這是使用波德圖的好處。
簡介
[編輯]波德圖是由貝爾實驗室的荷蘭裔科學家亨德里克·韋德·波德在1930年發明。波德用簡單但準確的方法繪製增益及相位的圖,因此他發明的圖也就稱為波德圖。[3]
波德圖幅頻圖的頻率用對數尺度表示,增益部份一般都用功率的分貝值來表示,也就是將增益取對數後再乘以10。由於增益用對數來表示,因此一傳遞函數乘以一常數,在波德增益圖只需將圖形的縱向移動即可,二傳遞函數的相乘,在波德幅頻圖就變成圖形的相加。幅頻圖縱軸0分貝以下具有正增益邊限、屬穩定區,反之屬不穩定區:

波德圖相頻圖的頻率也用對數尺度表示,而相位部份的單位一般會使用度。配合波德相頻圖可以估算一信號進入系統後,輸出信號及原始信號的比例關係及相位。例如一個Asin(ωt) 的信號進入系統後振幅變原來的k倍,相位落後原信號Φ,則其輸出信號則為(A k) sin(ωt − Φ),其中的k和Φ都是頻率的函數。相頻圖縱軸-180度以上具有正相位邊限、屬穩定區,反之屬不穩定區
若將系統的增益以複數表示,則複數增益取對數後的虛部即為相位,因此二傳遞函數的相乘,在波德相位圖上也是圖形的相加。

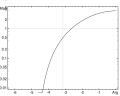
以下考慮有一個極點的高通濾波器、如圖2:

其中 f 是頻率,f1是極點的位置,單位都是Hz。圖中f1 = 100 Hz。此傳輸函數的絕對值為:

其相位為:

由於波德相位圖的縱軸相位使用角度而不是弳度,需要使用對應角度的反正切函數。波德增益圖的縱軸是轉換函數的分貝,其數值如下:

如下圖3是一個單一極點低通濾波器的波德圖:

於圖3中也有用直線近似的波德圖,常在自行繪製波德圖時使用,其原理會在後面的章節中說明。
波德圖的增益和相位很難單獨的變動、二者會互相牽扯,當調整系統的增益響應時,系統的相位響應也會隨之變化,反之亦然。最小相位系統的增益和相位特性之間可以用希爾伯特轉換來轉換,因此知道其中一項即可求出另外一項。
若轉換函數是有理函數,其零點及極點均為實數,則其波德圖可以用幾條漸近線的直線來近似,利用簡單的規則即可以徒手繪製。若近似的波德圖再修正每個截止頻率時的增益值,則其近似值會更接近實際值。
波德圖手繪的規則
[編輯]波德圖的前提就是可以處理以下型式函數的對數值:

上述函數的對數值可以轉換為極點及零點對數的和:

在繪製波德相位圖時直接使用了上述的概念。增益圖的繪製時則是以此概念為基礎,因為每個極點或零點其增益的對數均從0開始,而且其漸近線只有一個轉折點,因此繪製時可以再作簡化。
直線近似的增益圖
[編輯]波德圖增益分貝值一般都利用的公式。考慮以下的轉換函數:


其中及是常數,, ,而H是轉換函數。




- 在每個對應(零點)的位置,將直線的斜率增加/十倍頻[註解 1]。
- 在每個對應(極點)的位置,將直線的斜率減少/十倍頻。
- 圖在起始點時的增益值,可以依照圖中的角頻率下限,計算其對應的|H(jω)|。
- 圖在起始點時的斜率則依照有多少零點及極點低於角頻率下限,再依上述二個方式計算斜率,若所有點及極點均高於角頻率下限,起始點時的斜率為零。




在處理無法分解的二次多項式時,多半可以用的方式近似。


修正後的增益圖
[編輯]直線近似的增益圖可以用以下方式修正:
- 針對每個零點,在直線上方的位置增加一點。
- 針對每個極點,在直線下方的位置增加一點。
- 以原來的直線為漸近線繪製平滑曲線,通過上述各點,即為修正後的增益圖。

上述的修正方式只針對實數的極點或零點。若或為複數時,比較好的作法仍是找出無法分解的二次式,計算其在零點(或極點)附近的數值,再依數值決定要在直線上方或下方加點。
直線近似的相位圖
[編輯]考慮一個以下型式的傳遞函數:
可以先依每個極點及零點分別繪製相位圖,再將各相位圖相加。相位圖的曲線為以下的反正切函數。
![{\displaystyle -\mathrm {arctan} (\mathrm {Im} [H(s)]/\mathrm {Re} [H(s)])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ab16c65248c65455a92c4816a3e6bc1bb8251b31)
在繪製相位圖時,針對每個極點及零點:
- 若A為正數,其對應的相位圖是0度的水平線。
- 若A為負數,其對應的相位圖是180度的水平線。
- 對每個穩定的零點(其零點滿足 ,即),低於的部份為相位為0度的水平線,之後的直線斜率為+度/十倍頻,到為止,該點的相位為+度,超過此頻率的部份為相同相位的水平線。
- 對每個穩定的極點(其極點滿足 ,即),低於的部份為相位為0度的水平線,之後的直線斜率為-度/十倍頻,到為止,該點的相位為-度,超過此頻率的部份為相同相位的水平線。
- 若是不穩定的零點(或極點),其相位增加或減少的趨勢恰與上述相反。
- 將所有的相位圖相加,即為傳遞函數的完整相位圖。












簡易傳遞函數的波德圖趨勢
[編輯]以下是常見簡易傳遞函數的波德圖趨勢:
| 傳遞函數 | 範例圖形 | 波德增益圖 | 波德相位圖 |
|---|---|---|---|

|
若 K > 0,相位為 0 若 K < 0,相位為180度 | ||

|
斜率+20dB/十倍頻的斜線,的增益為0dB | 固定為+90度 | |

|
斜率-20dB/十倍頻的斜線,的增益為0dB | 固定為-90度 | |
(穩定零點) |

|
以下增益為0dB水平線,以上則以+20 dB/十倍頻的斜率上昇 | 以下相位為0度水平線,以上相位為+90度水平線,中間以+45度/十倍頻的斜線上昇,的相位為+45度 |
(穩定極點) |

|
以下增益為0dB水平線,以上則以-20 dB/十倍頻的斜率下降 | 以下相位為0度水平線,以上相位為-90度水平線,中間以-45度/十倍頻的斜線下降,的相位為-45度 |
(不穩定零點) |

|
以下增益為0dB水平線,以上則以+20 dB/十倍頻的斜率上昇 | 以下相位為0度水平線,以上相位為-90度水平線,中間以-45度/十倍頻的斜線下降,的相位為-45度 |
(不穩定極點) |

|
以下增益為0dB水平線,以上則以-20 dB/十倍頻的斜率下降 | 以下相位為0度水平線,以上相位為+90度水平線,中間以+45度/十倍頻的斜線上昇,的相位為+45度 |

|
以下增益為0dB水平線,以上則以-40 dB/十倍頻的斜率下降 | 以下相位為0度水平線,以上相位為-180度水平線,中間區域的特性則隨d不同而不同 |













舉例
[編輯]


另一種等效表示法為

其中為截止角頻率,單位是弧度每秒。

以角頻率表示的轉換函數如下

上述的方程式是一個正規化後的轉換函數,其波德圖如圖3,後續將介紹如何用直線來近似波德圖。
增益圖
[編輯]上述轉換函數的增益(以分貝表示)和頻率的關係如下:

![{\displaystyle {\begin{aligned}A_{\mathrm {vdB} }&=20\log |H(j\omega )|=20\log {1 \over \left|1+j{\omega \over {\omega _{\mathrm {c} }}}\right|}\\&=-20\log \left|1+j{\omega \over {\omega _{\mathrm {c} }}}\right|=-10\log {\left[1+{\frac {\omega ^{2}}{\omega _{\mathrm {c} }^{2}}}\right]}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c5f6369d343b45ecff3d44b065da241b676e0d48)
若在對數尺度的頻率下繪製不同頻率的增益,上式可以用二條直線近似,而這二條線也就是其波德圖增益圖的二條漸近線:

- 在角頻率小於時,因項較小,相對 1 而言可以忽略,因此其增益值為定值1,在增益圖上是一條位在0dB的水平線。
- 在角頻率大於時,因項比較大,相對而言 1 可以忽略,因此式子簡化為,是斜率為-20dB/十倍頻的斜線。[4]



上述的二條線在截止頻率處交會,在圖3可以看出,當頻率遠低於截止頻率時,電路的衰減量是0dB,對應其通帶增益為 1,此時濾波電路的輸出值和輸入值相同,而當頻率高於截止頻率時,信號會被電路衰減,越高頻的信號其衰減量越大。

相位圖
[編輯]上述轉換函數的相位和頻率的關係如下

其中, 分別是輸入角頻率及截止角頻率。 當輸入角頻率遠小於截止角頻率時(),比例的數值很小,因此相位角接近零度。當頻率增加,相位角的絕對值也隨之增加。在()時為-45度。當輸入角頻率遠大於截止角頻率時(>>,→∞),相位角會趨近-90度。


正規化圖
[編輯]波德圖(包括幅頻圖及幅相圖)的橫軸頻率部份均可以用正規化的頻率(無因次頻率,)表示。此時的圖稱為正規化的波德圖,而且其中不需考慮頻率的單位,因為頻率已改用頻率和截止頻率的比值來表示。
有極點和零點的範例
[編輯]圖4至圖7是有極點和零點的波德圖,可用來說明如何疊加不同極點的零點的圖形,得到完整的波德圖。
- 有極點和零點的範例
-
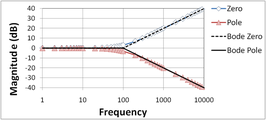 圖4:零點和極點的增益圖,標示"Bode"的是直線近似的增益圖
圖4:零點和極點的增益圖,標示"Bode"的是直線近似的增益圖 -
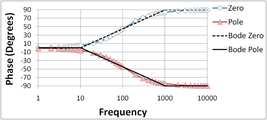 圖5:零點和極點的相位圖,標示"Bode"的是直線近似的相位圖
圖5:零點和極點的相位圖,標示"Bode"的是直線近似的相位圖


圖4是一個零點及極點(在相同頻率)的波德增益圖,及其直線近似的增益圖。以直線近似的圖來看,在頻率小於零點(或極點)時其增益圖為一水平線,超過零點(或極點)100後以20dB/十倍頻的斜率上升(或下降)。圖5則為其相位圖及直線近似的版本,在頻率小於零點(或極點)的十分之一時,其相位圖為一水平線,超過(10)之後以45度/十倍頻的斜率上升(或下降),直到等於零點(或極點)的十倍(1000)為止,之後相位圖為一數值為+90度(或-90度)的水平線。
- 有極點和零點的範例
-
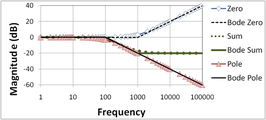 圖6:有零點和極點系統的增益圖,其中零點的頻率為極點的十倍,標示"Bode"的是直線近似的增益圖
圖6:有零點和極點系統的增益圖,其中零點的頻率為極點的十倍,標示"Bode"的是直線近似的增益圖 -
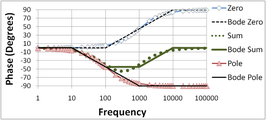 圖7:有零點和極點系統的相位圖,其中零點的頻率為極點的十倍,標示"Bode"的是直線近似的相位圖
圖7:有零點和極點系統的相位圖,其中零點的頻率為極點的十倍,標示"Bode"的是直線近似的相位圖


圖6及圖7分別是有一個極點及零點的系統的波德增益圖及波德相位圖,其中零點的頻率為極點的十倍。圖6中因為極點中的影響,在頻率超過100極點後,波德極點增益會以-20dB/十倍頻的斜率下降,但到1000時,因波德零點增益會以+20dB/十倍頻的斜率上昇,抵消極點的影響,因此在頻率超過1000之後,增益為一定值。
圖7的相位圖中,在高頻(頻率高於零點十倍)及低頻(頻率高於極點十分之一)處,其相位都為0度,低頻相位為零是因為零點及極點對相位的貢獻均為0度,高頻相位為零是因為零點及極點對相位的貢獻分別為+90度及-90度,互相抵消後總相位為0度。而中間的區域因極點及零點的相位抵消後不為零,因此可以看出其相位的變化。
在系統穩定性的應用
[編輯]波德圖可用來計算負反饋系統的增益邊限(gain margin)及相位邊限,進而確認系統的穩定性。
相關符號定義
[編輯]先定義以下的符號:

其中
- AFB是考慮反饋時的放大器增益(閉迴路增益)
- β是反饋係數
- AOL是不考慮反饋時的放大器增益(開迴路增益)。
在開迴路增益AOL遠大於1時,閉迴路增益AFB可以用以下方式近似

在開迴路增益AOL遠小於1時,閉迴路增益AFB可以用以下方式近似

增益AOL是頻率的複變函數,有大小及相位。[註解 2]
上述的式子中,若βAOL乘積=−1時,可能會出現增益無窮大(即為不穩定)的情形。(若用大小和相位來表示,此時βA的大小為1,相位為-180度,此條件會滿足巴克豪森穩定性準則)。配合波德圖,不但可以判斷系統是否穩定,也可以判斷系統接近以上不穩定條件的程度。
在判斷系統穩定性時,會用到以下二個頻率。第一個頻率f180是上述乘積相位恰為-180度的頻率,第二個頻率f0dB則為乘積的絕對值|β AOL|=1時的頻率(若以分貝表示時,則為0dB)。頻率f180可以用下式來計算:

其中| |表示複數的絕對值(例如| a + j b | = [ a2 + b2]1/2)。而頻率f0dB有以下的關係:

增益邊限及相位邊限
[編輯]增益邊限
[編輯]增益邊限(gain margin, GM)是衡量系統穩定程度的一種方法。在波德相位圖上可以找到βAOL相位到達-180度時的頻率,該頻率即為f180,之後就可以在增益圖上找到該頻率時βAOL的大小。
若|βAOL|180 > 1,表示此系統不穩定。若|βAOL|180 < 1,此系統穩定,而|βAOL|分貝值和0dB(對應增益大小為1)的距離表示系統距離不穩定的程度,稱為增益邊限。
增益邊限也可以用下式表示:

相位邊限
[編輯]相位邊限(phase margin, PM)是另一種衡量系統穩定程度的方法。在波德增益圖上可以找到|βAOL|大小為1的頻率,該頻率即為f0dB,之後就可以在相位圖上找到該頻率時βAOL的相位。
若βAOL( f0dB) 的相位 > −180°,表示在任何頻率時系統都會穩定,因為在f180時大小已小於1,f0dB時的相位和-180度之間的差稱為相位邊限。
若只是單純要判斷系統是否穩定,在系統為最小相位系統時,若以下的式子成立,則系統穩定:

若是非最小相位系統,需要用其他方式判斷穩定性,如奈奎斯特圖[5][6]。
舉例
[編輯]臨界穩定系統 1/β = 58 dB
[編輯]- 增益邊限及相位邊限範例,1/β = 58 dB
-
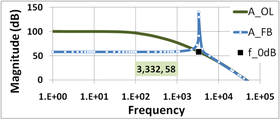 圖8:放大器的波德增益圖,其中有以分貝表示的閉迴路增益AFB及開迴路增益AOL,參數1/β = 58 dB,低頻時AFB ≈ 58 dB,因為 | βAOL| = 1 出現的頻率和f180°的頻率非常接近,其增益邊限幾乎為0。
圖8:放大器的波德增益圖,其中有以分貝表示的閉迴路增益AFB及開迴路增益AOL,參數1/β = 58 dB,低頻時AFB ≈ 58 dB,因為 | βAOL| = 1 出現的頻率和f180°的頻率非常接近,其增益邊限幾乎為0。 -
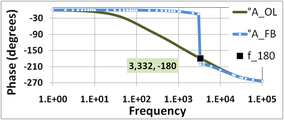 圖9:放大器的波德相位圖,其中有以度表示的閉迴路相位°AFB及開迴路相位°AOL,因為相位到-180度的位置非常接近f = f0dB(即 | βAOL| = 1)的頻率,因此相位邊限也很接近零度。
圖9:放大器的波德相位圖,其中有以度表示的閉迴路相位°AFB及開迴路相位°AOL,因為相位到-180度的位置非常接近f = f0dB(即 | βAOL| = 1)的頻率,因此相位邊限也很接近零度。


圖8及圖9可說明增益邊限及相位邊限在實際系統中的應用。圖8是一個放大器的波德增益圖,圖中有繪出不考慮反饋的增益大小(開迴路增益)AOL及考慮反饋的增益大小(閉迴路增益)AFB。在負反饋放大器條目中有進一步的說明。
在此例中,低頻的AOL = 100 dB,而1/β=58dB。低頻時AFB的近似值也是58dB。
因為圖中只繪出開迴路增益AOL,不是β AOL,因此判斷f0dB的條件改為AOL = 1 / β。在低頻時βAOL遠大於1,AFB可近似為 1 /β,因此可以用AFB代替 1 /β,因此AFB及AOL相交的位置即為f0dB(後續在計算相位增益時需要頻率f0dB)。
在f0dB附近,閉迴路增益有很大的突波,因此該頻率時β AOL可能很接近-1(若β AOL=-1,就會有無窮大的增益)。頻率超過f0dB之後,AOL遠小於1,因此AFB可近似為 AOL。
圖9則是二種增益在相位上的比較,低頻時閉迴路增益的相位接近0度,但在頻率=f180時,開迴路增益的相位為-180度,而閉迴路增益突然下降到幾乎-180度的位置。因開迴路增益相位為−180度,因此相位邊限為0度(-180度-(-180度)=0度)。(參閱簡介)
根據圖8及圖9,可以看出此放大器的零分貝頻率f0dB及相位反轉頻率f180非常接近:f180 ≈ f0dB ≈ 3.332 kHz,而3.332 kHz對應之開迴路增益為58dB(1/β = 58 dB),58db-58dB=0dB。因此增益邊限及相位邊限都非常接近零,此系統為臨界穩定。
穩定系統 1/β = 77 dB
[編輯]- 增益邊限及相位邊限範例,1/β = 77 dB
-
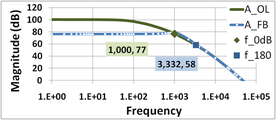 圖10:放大器的波德增益圖,其中有以分貝表示的閉迴路增益AFB及開迴路增益AOL,參數1/β = 77 dB,增益邊限為19 dB。
圖10:放大器的波德增益圖,其中有以分貝表示的閉迴路增益AFB及開迴路增益AOL,參數1/β = 77 dB,增益邊限為19 dB。 -
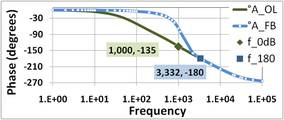 圖11:放大器的波德相位圖,其中有以度表示的閉迴路相位°AFB及開迴路相位°AOL,相位邊限為45度。
圖11:放大器的波德相位圖,其中有以度表示的閉迴路相位°AFB及開迴路相位°AOL,相位邊限為45度。


圖10和圖11是在較小反饋係數β(1 / β = 77 dB)時,同一系統的波德圖,由於β較小,因此| β AOL | = 1出現在較低的頻率,而低頻時AFB也是近似1/β(77 dB)。
圖10是波德增益圖。1 / β及AOL的曲線在f0dB = 1 kHz時相交。在f0dB附近閉迴路增益AFB沒有明顯的突波[註解 3][7]。
圖11是波德相位圖。利用增益圖上得到的f0dB = 1 kHz,對應的開迴路相位為−135度,因此相位邊限為正45度(-135度-(-180度)=45度)。(參閱簡介)
圖11和圖9的函數只有反饋係數β不同,其開迴路的波德相位圖均相同,因此圖11的f180和圖9相同,都是3.332 kHz。[註解 4]對應的開迴路增益為58dB,和1/β=77dB比較,增益邊限為19dB。而相位邊限為正45度,此為〈穩定系統〉。
在比較放大器的響應時,穩定性不是唯一的重點,在許多應用中良好的階躍響應比穩定性更重要。依照經驗法則,良好的階躍響應需要至少45度的相位邊限,若將製造時元件參數偏差一併列入考慮,理想的相位邊限最好要超過70度。[8]在階躍響應條目有關相位邊限的段落中有更深入的說明。
波德分析儀
[編輯]
波德分析儀(Bode plotter)是一種類似示波器的儀器,可以量測反饋控制系統或濾波器在各頻率的增益及相位變化,繪製成波德圖。右圖即為一例,波德測試儀可以量測系統的截止頻率、增益邊限及相位邊限,在分析或測試系統的穩定性時很有幫助。
波德分析儀的功能和網路分析儀一様,不過網路分析儀一般會用來分析相當高頻時的系統特性。
在教育或研究的應用上,利用波德分析儀繪製特定傳遞函數的波德圖也可助於了解該系統的特性。
其他相關圖
[編輯]奈奎斯特圖和尼柯爾斯圖都和波德圖有關,這些圖和波德圖都是顯示頻率響應的資料,不過使用的座標系統不同。奈奎斯特圖和尼柯爾斯圖都是以頻率為其參數的參數方程。奈奎斯特圖將各頻率的頻率響應以極座標的方式繪出,因此各點距原點的距離是增益,各點相對原點的角度是相位。尼柯爾斯圖即是將頻率響應的增益(縱軸)及相位(橫軸)均以線性刻度表示、用直角坐標系的方式繪出,其中增益使用對數尺度()。

- 相關圖
-
-
 同一頻率響應的尼柯爾斯圖。
同一頻率響應的尼柯爾斯圖。


相關條目
[編輯]註解
[編輯]- ^ 由於波德增益圖的橫軸為對應尺度,斜率的單位常用「dB/十倍頻」(dB/decade),以+20dB/十倍頻為例,在頻率為原來十倍時,增益會增加20dB,波德相位圖的斜率則用「度/十倍頻」表示。
- ^ 一般而言,頻率上昇時增益的大小會下降,而增益的相位也會往負值移動。不過這個只是趨勢,有時在特定的頻率區域,增益可能不會遵循上述的關係,此時增益邊限及相位邊限的概念就不適用,不過還是可以用其他方法(如奈奎斯特圖來判斷穩定性)
- ^ 利用巴特沃斯濾波器可以使閉迴路增益的波峰降到最小
- ^ f180是相位到達-180度的頻率,在此實數的反饋係數β只會影響增益的大小,不會影響相位。
參考文獻
[編輯]- ^ I.J.Nagrath; M.Gopal. Control System Engineering. Wiley. 1984: 252. ISBN 957-9590-53-2.
- ^ What Bode Plots Represent (PDF). [2010-09-21].[永久失效連結]
- ^ Van Valkenburg, M. E. University of Illinois at Urbana-Champaign, "In memoriam: Hendrik W. Bode (1905-1982)", IEEE Transactions on Automatic Control, Vol. AC-29, No 3., March 1984, pp. 193-194. Quote: "Something should be said about his name. To his colleagues at Bell Laboratories and the generations of engineers that have followed, the pronunciation is boh-dee. The Bode family preferred that the original Dutch be used as boh-dah."
- ^ Richard C. Dorf; Robert H. Bishop. Modern Control Systems. Addison Wesley. 1995: 395. ISBN 0-201-50174-0.
- ^ Thomas H. Lee. The design of CMOS radio-frequency integrated circuits Second Edition. Cambridge UK: Cambridge University Press. 2004: §14.6 pp. 451–453 [2010-09-21]. ISBN 0-521-83539-9. (原始內容存檔於2009-02-05).
- ^ William S Levine. The control handbook: the electrical engineering handbook series Second Edition. Boca Raton FL: CRC Press/IEEE Press. 1996: §10.1 p. 163 [2010-09-21]. ISBN 0849385709. (原始內容存檔於2017-08-26).
- ^ Willy M C Sansen. Analog design essentials. Dordrecht, The Netherlands: Springer. 2006: §0517-§0527 pp. 157–163 [2010-09-21]. ISBN 0-387-25746-2. (原始內容存檔於2009-05-30).
- ^ Willy M C Sansen. §0526 p. 162. [2010-09-21]. ISBN 0-387-25746-2. (原始內容存檔於2009-05-30).
外部連結
[編輯]- 詳細的波德圖解釋[永久失效連結](英文)
- 波德圖的解釋,有影片及範例(英文)
- 如何繪直線近似的波德圖 (頁面存檔備份,存於網際網路檔案館)(英文)
- 如何波德圖繪法摘要 (英文, PDF)
- Bode plot applet - 可輸入轉換函數的係數,計算增益大小及相位
- 電化學中的電路分析 (頁面存檔備份,存於網際網路檔案館)(英文)
- Tim Green: Operational amplifier stability (頁面存檔備份,存於網際網路檔案館)包括一些波德圖的簡介
- A4空白波德圖(pdf)