
此項目頁的主題是數學術語。關於物件的旋轉運動,請見「
轉動」。
 繞點
繞點 的二維旋轉。
的二維旋轉。
旋轉在幾何和線性代數中是描述剛體圍繞一個固定點的運動的在平面或空間中的變換。旋轉不同於沒有固定點的平移,和翻轉變換的形體的反射。旋轉和上面提及的變換是等距的,它們保留在任何兩點之間的距離在變換之後不變。
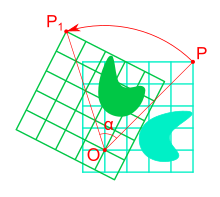
 在繞一個點旋轉之後繞另一個不同的點的平面旋轉導致要麼是旋轉(如本圖)要麼是平移的一個總和運動。
在繞一個點旋轉之後繞另一個不同的點的平面旋轉導致要麼是旋轉(如本圖)要麼是平移的一個總和運動。
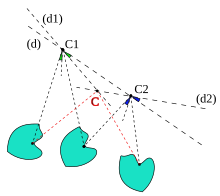
 在針對一個軸的反射之後的針對不平行於前一個軸的反射導致是繞兩個軸的交點的旋轉的一個總和運動。
在針對一個軸的反射之後的針對不平行於前一個軸的反射導致是繞兩個軸的交點的旋轉的一個總和運動。
在討論旋轉的時候理解參照系是重要的。一種觀點來看,你可以保持坐標軸固定旋轉向量。而從另一觀點出發,你可以保持向量固定旋轉坐標系。
在第一種觀點看來,坐標或向量關於原點的逆時針旋轉;或者從第二種觀點看來,平面或軸關於原點的順時針旋轉。這裏的 被旋轉了
被旋轉了 並希望知道旋轉後的坐標
並希望知道旋轉後的坐標 :
:

或


平面或軸關於原點的逆時針旋轉,在新平面中的坐標將順時針旋轉到舊坐標。在這種情況下,如果在舊平面中的坐標是,同一個向量在新平面中的坐標是,則:

或


向量的大小同於向量 的大小(正交變換是保距映射)。
一個是點的旋轉,坐標系沒動,得到的是:動的點在原來坐標系下的表示。
另一個是坐標系的旋轉,點是不動的,得到的是:不動的點在動了的坐標系下的表示。
坐標或向量關於原點的逆時針旋轉 平面或軸關於原點的順時針旋轉。
平面或軸關於原點的順時針旋轉。
坐標或向量關於原點的順時針旋轉平面或軸關於原點的逆時針旋轉。
順時針(逆時針)旋轉可以理解為逆時針(順時針)旋轉一個負角度,根據  ,
, 的奇偶性,即
的奇偶性,即  ,
, 可在逆時針旋轉和順時針旋轉的變換公式之間相互轉換。
可在逆時針旋轉和順時針旋轉的變換公式之間相互轉換。
複數可以看作是在複平面中的二維向量,它的尾部在原點而頭部由這個複數給出。設

是這樣一個複數。它的實部是橫坐標而虛部是縱坐標。
則z可逆時針旋轉角度θ,通過乘以 (參見歐拉公式, §2)。
(參見歐拉公式, §2)。
 |

|
|
|

|
|
|

|
|
|

|
這可以被看作對應於在§ 1中描述的旋轉。
因為複數的乘法是交換性的,不同於在更高維中的情況,二維旋轉是可交換的。[1]
 旋轉描述剛體圍繞一個點的運動。
旋轉描述剛體圍繞一個點的運動。
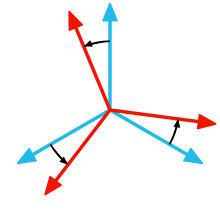
在普通三維空間中,坐標旋轉可以用歐拉角來定義,或關於要繞其旋轉的向量和一個單一的旋轉角度構成的軸角定義。
關於原點的旋轉最容易使用叫做旋轉矩陣的3×3 矩陣變換來計算。關於其他點的旋轉可以使用表現齊次坐標的4×4矩陣來描述。
表現在三維空間中的旋轉的一種可供選擇的方式是四元數。
四元數提供了表示在三維中旋轉和方向的另一種方式。它們應用與計算機圖形學、控制理論、信號處理和軌道力學中。例如,在太空船的姿態控制系統中常用四元數來下達指令,還用於測距它們的當前姿態。基本原理是組合很多四元數變換比組合很多矩陣變換在數值上更加穩定。
描述旋轉的所有矩陣的集合M(v,θ)加上矩陣乘法運算叫做旋轉群:SO(3)。




